VR HeadTracking 分析
更新日期:
基本原理
VR 通过分屏渲染一个虚拟的世界,让佩戴者产生沉浸感,如下图所示:
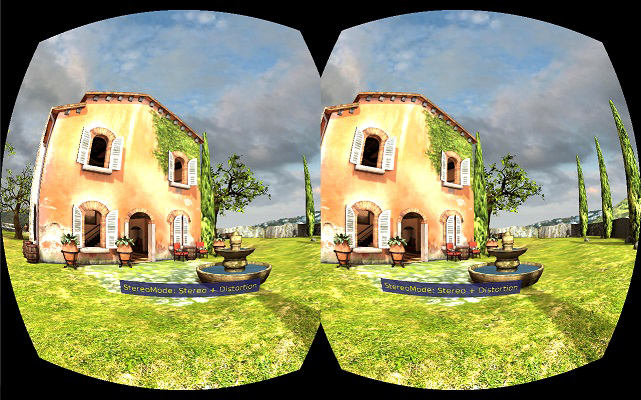
上面中屏幕中的虚拟世界画面,是由 OpenGL 渲染的 3D 世界。我们这里不讨论分屏、反畸变原理,所以只看其中的一边屏幕。我们先说下 OpenGL 中构建虚拟世界的 MVP 矩阵:
MVP 矩阵
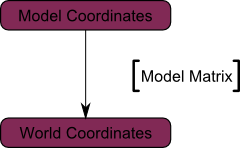
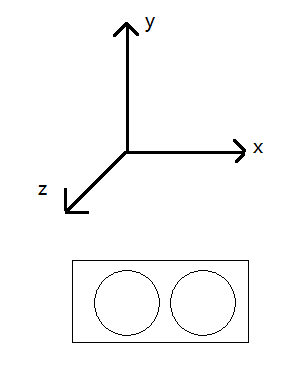
假设 3D 空间中有一个物体,如下图所示:
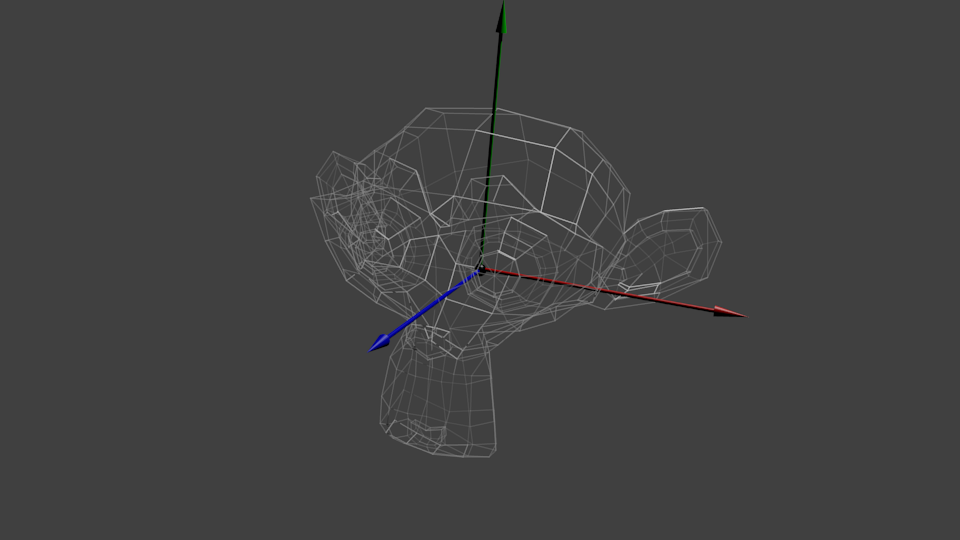
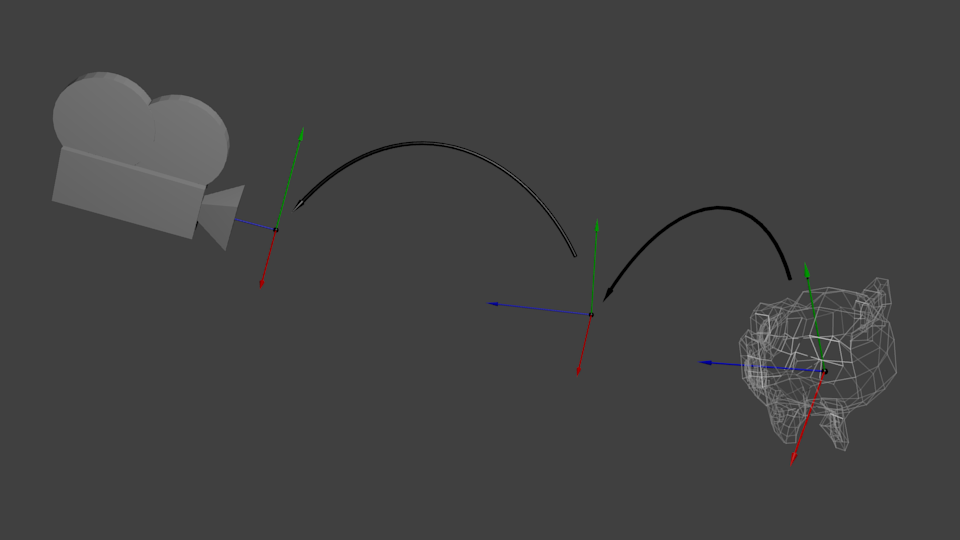
假设 (0,0,0,) 为物体的中心,那么这个物体的其他顶点都相对这个中心有自己的坐标。3D 空间也有自己的坐标,这个叫做世界坐标。如果要把这个物体放到 3D 空间中(在3D空间显示,也就是在虚拟世界显示),那么需要将物体的坐标转化为世界坐标。进行这个运算的矩阵叫做模型矩阵(Model Matrix):
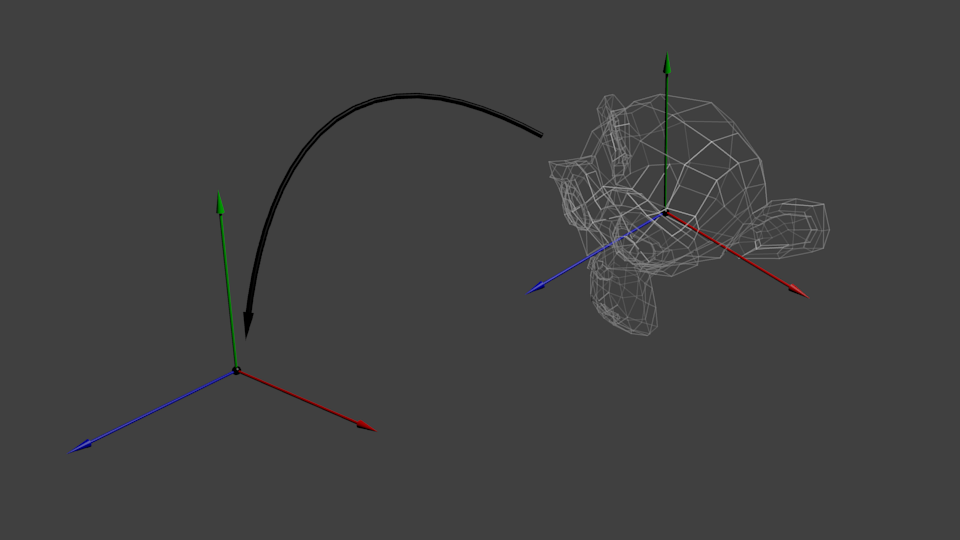
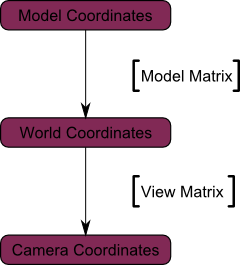
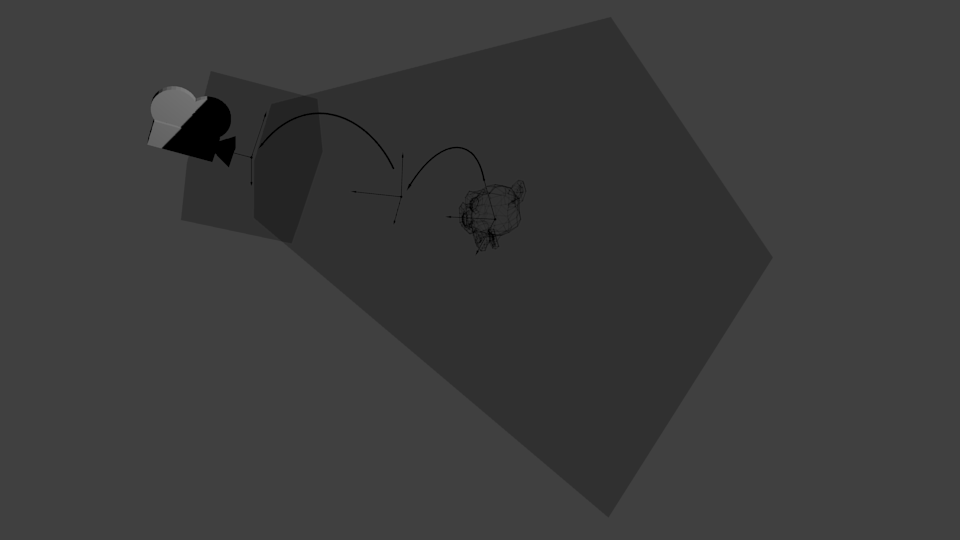
在虚拟世界中创建了物体,作为人(用户),需要能够感知(看到)这个世界(中的物体),假设有台摄像机在记录这个虚拟世界,那么这个摄像机以不同的角度就能观察到虚拟世界中的不同内容,也就是存在某种转化,把虚拟世界中的内容转化到摄像机当中(虚拟世界坐标转化到摄像机坐标)。进行这个运算的叫视图矩阵(View Matrix):
但是最后虚拟世界需要显示到一个2D的屏幕上,所以需要将摄像机中看到的内容投影到一个2D的平面上(摄像机摄影了,放映到屏幕上)。一般的这个投影是个锥形的(OpenGL 的一种投影,叫透视投影 Perspective)。进行这个投影运行的叫投影矩阵(Project Matrix):

经过上面的一些列变化(矩阵运算),最终就能将一个3D的虚拟世界显示到一个2D的屏幕上,上面的矩阵运算一般通过矩阵的乘法,在一起运算,所以上面的三个矩阵,在 OpenGL 中就合在一起叫 MVP 矩阵。
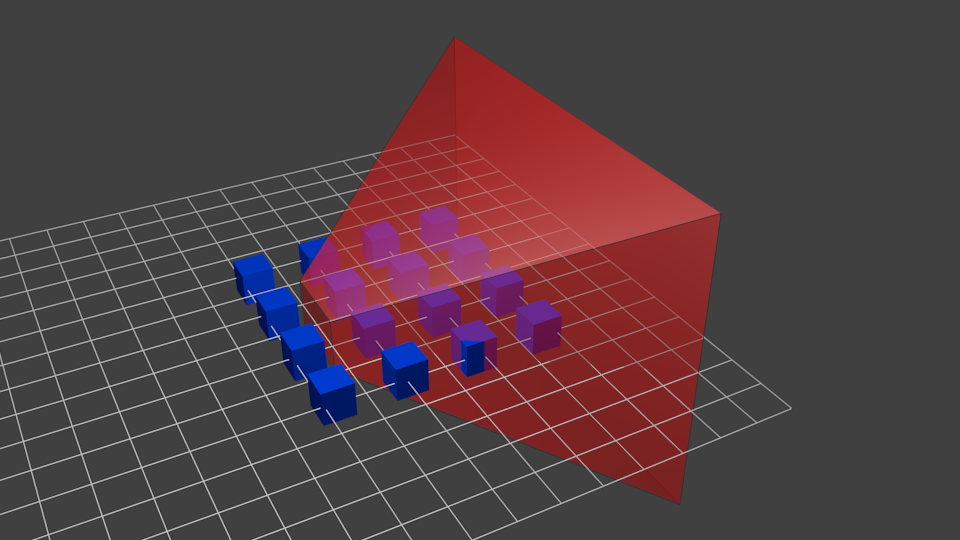
举个形象点的例子:蓝色的是虚拟世界中的物理,红色的表示摄像机透视投影的锥形:
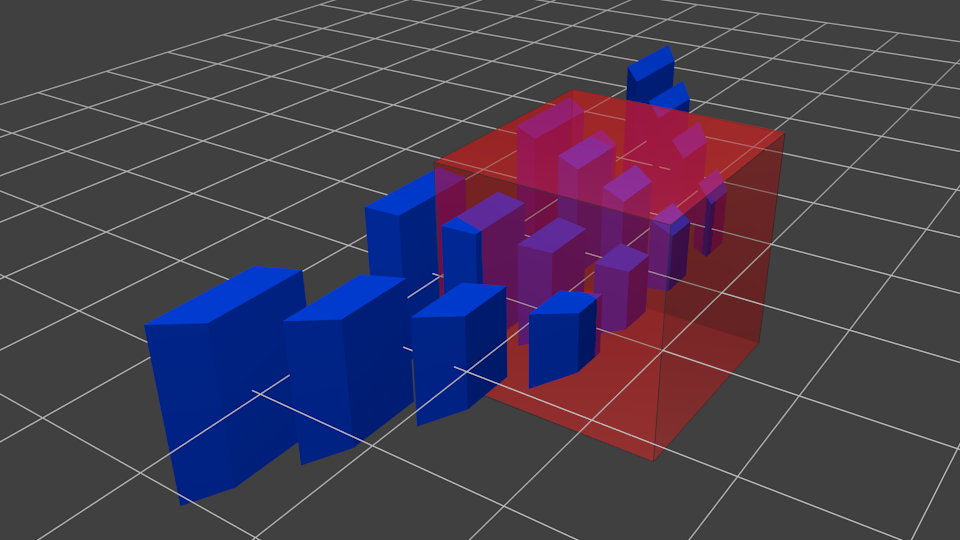
那么投到一个矩形的屏幕上虚拟世界中的物体就会变形成这样:
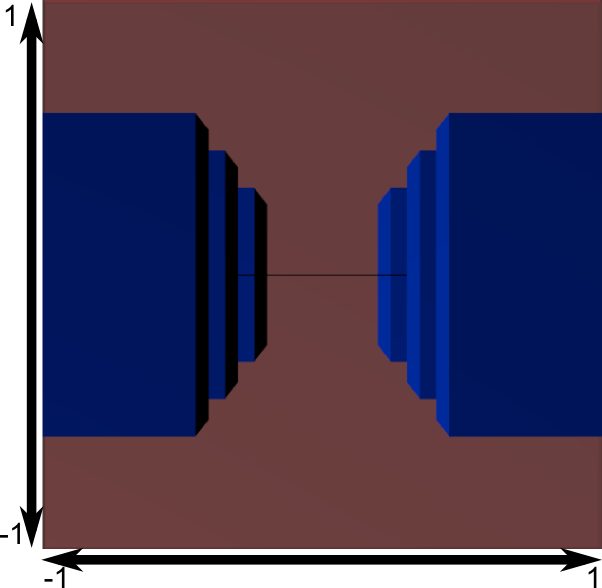
然后显示到2D窗口中最终图像是就是这样的:
头部跟踪
那么头部跟踪和前面介绍的 MVP 矩阵有什么关系呢。其实人戴着 VR 头盔转动,就是想和一个摄像机一样观察看虚拟世界不同的场景,所以头部跟踪就是将 VR 头盔的转动,反映到 View Matrix 上。那怎么反映,这里再来介绍一下另外一个概念:在3D空间中如何转动一个物体。
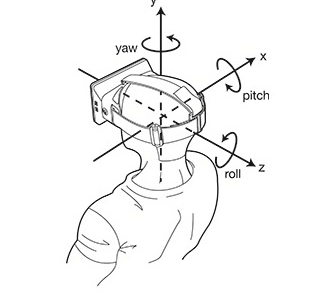
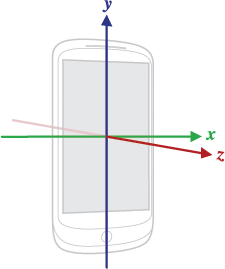
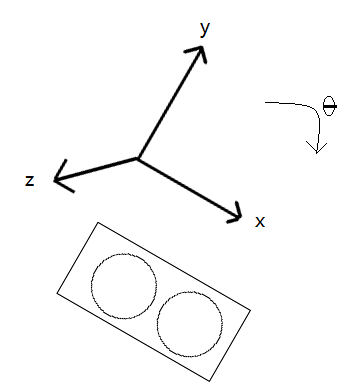
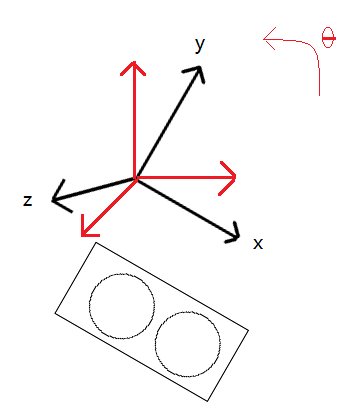
3D 空间有3个轴x,y,z,在 VR 领域大家更习惯用 yaw(y),pitch(x),roll(z)来表示。如果依次沿着x,y,z轴转动相应的角度,那么这个物体就有得到一个新的朝向(Orientation):
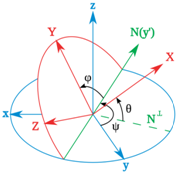
沿着这3个轴转动的角度叫做 欧拉角(Euler Angle)。欧拉角是有顺序的,按照不同的顺序变化,角度是不同的:例如 x,y,z 和 y,x,z 。我们的 sdk 使用的顺序是 y,x,z,也就是 yaw,pitch,roll。
欧拉角可以表示一个朝向,但是欧拉角是三个独立的角度,不利于连续的插值变化运算,所以有人发明了四元数(Quaternion)。欧拉角和四元数可以相互转化,具体的数学公式这里不详细说了(可以网上查资料),sdk 里有 api 可以直接使用。
利用欧拉角可以在3D空间中进行旋转操作,也就是说摄像机的转动可以使用欧拉角来运算。头部跟踪就是要得到 VR 头盔实时转动的欧拉角,然后通过 MVP 反映到渲染的图像上。
在 android 平台上,陀螺仪(Gyroscope)上报的3轴的数据正好就是表示3个轴旋转的角速度:
假设使用一个四元数来表示当前摄像机(头盔)的朝向(O)。那么在 t0 时刻 O 初始值为 0。经过 delta 时间,在 t1 时间读取陀螺仪的角速度 s,那么这个时刻,头盔转动过的欧拉角是:
angle = delta * s
那么在当前朝向的基础上转动这个欧拉角,就能得到头盔的新朝向 O1:
O1 = O + angle
如果持续重复这个过程,那么摄像机(头盔)就能模拟人转动想看到的虚拟世界中的场景,这个过程就叫头部跟踪(HeadTracking)。
数据通路
全志的 sdk 中头部跟踪的数据通路是这样的:
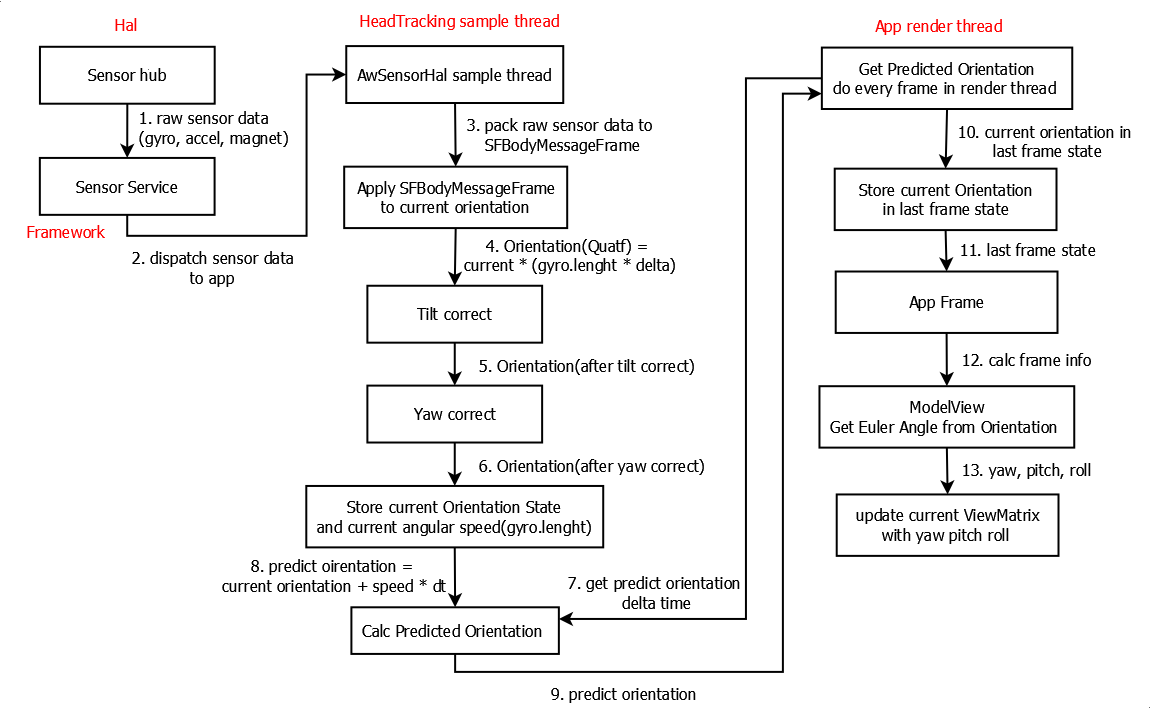
上面的数据通路主要分成3块:
底层原始数据
应用通过 API 让 android system service 中的 sensor service 打开 sensor hub,sensor hub 就开始以指定的频率上报需要的数据,VR 的头部跟踪目前主流用到的是3个传感器的数据:陀螺仪(gyro)、重力加速度(accel),地磁(mag),每一个传感器有 x、y、z 3个轴的数据,将这3个传感器的数据融合(fusion)得到一个四元数的朝向,就叫9轴融合。市面上很多VR说的支持9轴传感器,就是融合陀螺仪、重力、地磁的意思。sensor service 读到数据后,就会通过 local socket 发送给上层应用。
头部跟踪模块数据融合
头部跟踪模块在软件分层中属于应用层,头部跟踪会开启一个后台采样线程将收到的 gyro、accel、mag 重复的按照下面步骤融合(fusion)成四元数(Quat)朝向(Orientation):
- 将 gyro、accel、mag 打包成一个数据包,具体后面说明。
- gyro 通过累积变化,计算当前朝向(第一章说明)。
- 重力校准(tilt correct),具体后面说明。
- 地磁校准(yaw correct),具体后面说明。
- 保存最后计算的朝向,等待渲染线程来取。
应用渲染线程获取朝向
一般的 VR OpenGL 应用都会有一个渲染线程,会在每一帧从头部跟踪模块获取到最新的朝向,从朝向中获取转动欧拉角,然后应用到视图矩阵。
这里的渲染线程和上面的采样线程是独立的,采样线程只是不停的融合 sensor 数据,实时更新最新朝向,等待有人来取。一般来说在 VR 上 gyro、accel 的采样率都是 1000Hz 以上(我们的目前是 800Hz),而且渲染的帧率一般是 60fps(某些高端的 VR 已经到 70fps 甚至 120fps 了)。这里就有一个疑问,既然渲染的帧率才 60,那为什么采样率需要那么高呢?这是因为采样率越高,那个计算出来的最新朝向就越能代表当前设备真实的朝向,表现在画面上的延迟感就会更低。这也就是为什么 VR 上要单独设计一个 sensor hub 的原因(高采样率的 sensor 如果通过通用 cpu 来处理,那么会对上层系统造成极大的负载,所以使用一个小 cpu 来单独处理高采样率的 sensor)。
所以我们 sdk 里的数据模型是:采样线程在后台以高频率接收 sensor 数据,并融合出最新的朝向,保存起来。前台的渲染线程按照自己的帧率从采样线程获取朝向。
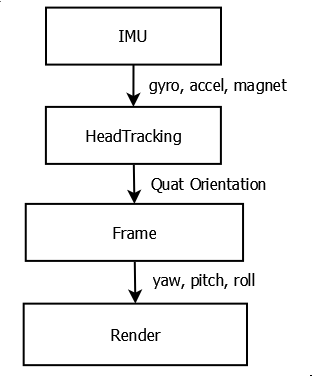
简洁的来说整个数据通路各个模块的输入输出就是下面这个样子:
打包处理
接下来我们细分几块来把之前数据通路的几个地方说清楚。首选是打包处理。在头部跟踪模块接收到 sensor service 发送过来的 sensor 数据,会有一个打包的操作。这个包简单来说包含5个数据:
- Gyro:陀螺仪,当前转动角速度,用于计算朝向增量变化
- Accel:重力加速度,当前的位置信息,用于 tile correct
- Mag:地磁,当前的位置信息,用于 yaw correct
- Delta:sensor 上报的时间间隔,当前的时间戳与上一个数据包的时间戳相减得到,朝向增量变化使用这个 dt,这个是 sensor hub 带上来的时间
- TimeStamp:收到 sensor 的时间戳,预测朝向计算使用这个 dt,这个是上层系统的时间
上面5个数据组成一个数据包(结构体 sdk 里叫 SFBodyMessageFrame)。这里先说一下,为什么需要打包。由于 sensor 的零漂误差(drift error),所以需要 tile correct 和 yaw correct(后面在说)。所以理论上来说需要 gyro、accel、mag 这3个数据一一对应(要拿当前时刻的 accel 和 mag 来校准当前时刻的 gyro 转动)。
但是这是理论情况,实际上,很有可能底层上报的数据并不是严格一一对应的(底层可以一次上报同时包括 gyro、accel、mag 三个数据的)。目前我们的平台,首先 gyro、accel 的采样率是 800Hz,mag 是 100Hz,gyro、accel 和 mag 就不可能一一对应上。然后 gyro、accel 虽然频率一样,但是上报也不是成对的,经常是先报一个 gyro,然后再 accel,或者反过来。
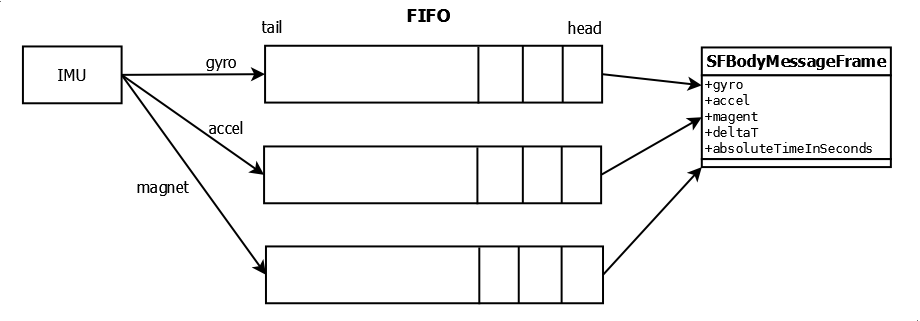
所以 headtracking 这边的前处理就是:
- 创建3个 fifo 分别保存收到的 gyro、accel、mag
- 以 gyro fifo 中的数量为准(cnt 个),循环 cnt 次,分别从3个 fifo 中把 gyro,accel,mag 取出,打包到结构体中(SFBody);将已取出打包的数据分别从 fifo 中删除。
- 保存上一次打包的 gyro 的 timestamp(sensor hub 带上来的,lastGyroTimestamp),将当前的 gyro 的 timestampe 和 lastGyroTimestamp 相减得到 Delta。并且获取当前系统时间戳,作为 SFBody 的 Timestamp(AbsoluteTimeInSeconds)。
- 如果2中 gyro fifo 为空,那么等待 gyro 数据。在等待过程中,如果 accel fifo 中的数据超过了一定时间没有被打包走,那么认为是过时的数据,将过时的 accel fifo 清空。
用图来表示,大概是这样的:
解释一下上面的打包处理:
对于2,打包的 SFBody 中可以没有 accel 或者 mag,但是一定会有 gyro。这是因为就算朝向变化,是依靠 gyro 来计算的,如果这次的数据没有 gyro,那么就无法计算朝向变化,accel 和 mag 只是用来校准的而已,没有只是影响朝向的精度。这样处理,是尽可能的让 gyro 和 accel 一一对应,同时放宽条件,允许底层上报数据的时候存在一定的偏差,不严格一一对应。
对于3,这里用到了2套时间系,分别是 sensor hub 上报 sensor 带上来的时间戳,和上层系统(android)的系统时间戳。前者是用来计算朝向变化的(angle x dt)。后者是用来计算预测的,预测后面再说。为什么使用2套时间系,是因为 sensor hub 带上来的时间戳,是 sensor 采样时候的时间戳,表示2个 sensor 时间之间的时间间隔,而如果 android 系统的时间戳,表示的是 headtracking 收到 sensor service 发送 sensor 的时间。这2套时间体系是有误差的,所以在计算 deltaT 的时候只能统一采用一套。所以计算朝向变化统一使用 sensor hub 上报的时间戳。预测需要应用传入时间戳,而应用只能获取到 android 系统的时间,所以预测统一使用 android 系统的时间系统。
对于4,由于2没有严格要求 gyro 和 accel 一一对应。所以这次采用一个过时机制,保证打包的 gyro、accel 在时间上相差不是特别大。而mag fifo 不处理,因为 mag 的采样率比 gyro、accel 低很多,而且在 yaw correct 的时候会处理 mag 采样率的延迟,所以不需要在打包的时候去考虑 mag 的过时。
Tile Correct
说校准之前先接着补充说一下第一章的基本原理。第一章说了 headtracking 就是让 sensor 数据表现在摄像机上,这里说一下怎么旋转摄像机的。VR 世界里面,需要构造一个虚拟世界,那么世界肯定要是正的,例如说这样的:
OpenGL 的初始状态世界坐标是正的,假设 VR 设备这个时候也是正的:
如果 VR 设备向右边歪一下,屏幕也就往右边歪了,那么世界坐标就歪了:
往如果要继续保持世界坐标系看起来是正的,这个时候摄像机就需要向反方向旋转:
头部跟踪的本质就是通过旋转视图矩阵(摄像机),让世界坐标系看上去是正的。这里就有一个概念:VR 世界里面,看上去的世界坐标是正的(下面为了方便,就直接说世界坐标了,而不特意强调是看上去的世界坐标)。
校正原理
说明白了上面的概念后,就可以来说 tile correct 了。为什么需要 tile correct,是因为 gyro 在实际的采样过程中是会存在误差的,可能每一次的误差并不是很大(sensor 厂商的 datasheet 范围内),但是由于持续的使用,就会存在累积误差,一段时间后,累积误差就会很大,从而能让使用者感知到位移误差。gyro 是有3个轴的,所以误差是在3个轴都有的,这里说的 tile correct 指的是倾斜误差,指的是 x,z 轴的误差,为什么没 y 轴的,后面会说明。
由于 gyro 的累积误差导致 x,z 轴旋转有误差,所以旋转的摄像机看到的世界坐标就是倾斜的,所以叫 tile correct。那怎样校正呢。
- 我们假设有一个竖直向上的向量 up (0, 1, 0)
- 那么有 up’ = up * current orientation, up’ 就是 up 在当前朝向上的分量
- 如果 gyro 没有误差,那么计算出来的 orientation 应该要使摄像机看到的世界坐标也是正的,那么 up’ 应该还是 (0, 1, 0)
- 也就是说如果 up’ 和 up 存在夹角(error),那么这个夹角就是误差角,我们只要将当前朝向回正这个误差角,就做到校正了(保证世界坐标系是正的)
- 我们知道地球的重力加速度是永远垂直向下的,在 android 上上报的方向正好相反,向上是正的,所以我们可以用 accel 来测量(measured) up’。用当前朝向和 accel 可以计算出 up’ ,然后用 up’ 和理论 up(0, 1, 0)计算夹角,就能得到误差偏移角(error)。
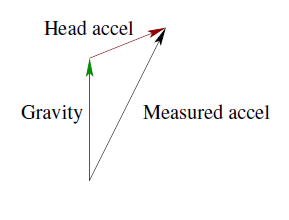
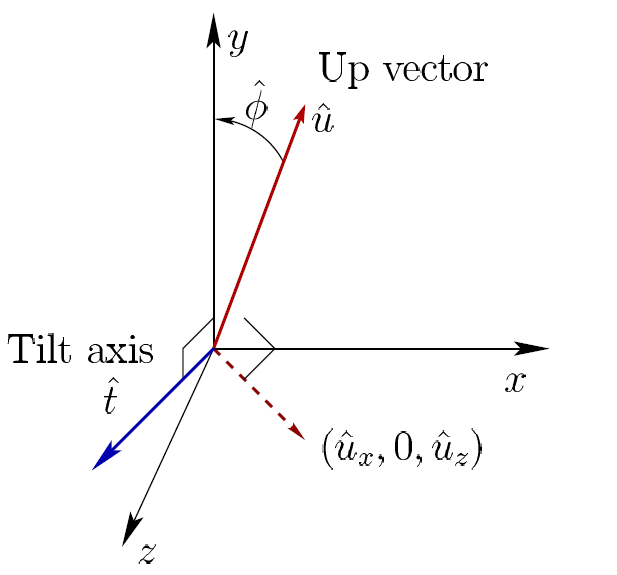
上面这个过程就是我们的 headtracking 中使用的 tile correct 的原理。因为为沿 y 轴旋转 accel 是没有变化的,所以 tile correct 只能校正 x,z 轴。
细节处理
下面说一下 tile correct 的几点细节:
1. 由于 accel 也是存在误差的(只要是 sensor 都会存在误差),但是 accel 的变化没有 gyro 那么明显,所以 headtracking 中使用了一定的过滤方法来过滤一定样本的 accel。具体的过滤方法可以去看代码(大致是一定样本数量+低斯滤波)。
2. tile correct 的 error 角度,如果太大的话,那么用户是会有明显的感知的。为了避免这个问题,有下面的处理:
a. 第一次 tile correct (GetSize() == 1)允许完全使用 error 角度计算。 因为第一次 tile correct 一般都是刚开机,或者是休眠唤醒的时候。这个时候的设备的朝向一般都不是正的,坐标系是默认按照屏幕方向的,所以这个时候进行完全校准,能让坐标系回到正方向。但是相对的,如果这个过程被用户看到了,就会发现画面突然跳变了一下。这里就引申出一个问题,休眠唤醒的时候画面会跳一下。处理方法就是,可以尽量提高头部跟踪的启动速度,和第一次 tile correct 的速度,如果赶在渲染第一帧之前就完成第一次 tile correct 那么画面就不会有“明显”的跳动感。
b. 如果 error 角度不大(Abs(error.w) < cos(snapThreshold / 2)),并且设备“相对静置”(Confidence > 0.75),那么也允许完全使用 error角度。相对静置,其实就是上面的 accel 的过滤采样的样本的方差,通过一个公式计算得到一个信任分数(Confidence,和sensorhub gyro 那章判断静置的分数计算类似)。如果设备非水平转动,那么 accel 的3轴数值会变化(水平转动,accel 的变化不大),那么这个分数就会比较低。
c. 设备“比较静置”(Confidence > 0.5),那么对计算出的 error 角度进行一个插值(Nlerp),弱化补偿效果,让补偿转动不明显。比较静置就是上面那个信任分数稍微低一点。插值的实现自己去看代码吧,我也不是熟,反正就是弱化这个角度的作用。
d. 如果不静置,就不进行 tile correct。也就是上面的信任分数很低。
上面的处理情况,代码就是这样的:
|
|
Yaw Correct
校正原理
上面 accel 只能校正 x,z 轴,那么下面就是要进行 y 轴校正了(yaw correct)。和 tile correct 的原理类似,对于水平方向上来说,如果存在一个水平指北的向量,并且我们可以 measured 这个方向,那么我们可以用和 tile correct 类似的原理那校正 y 轴。
我们很自然的想到地磁(mag),可以用做指南针(其实它是指北的)。但是和 accel 不同的是,地磁在不同的区域是不一样的:
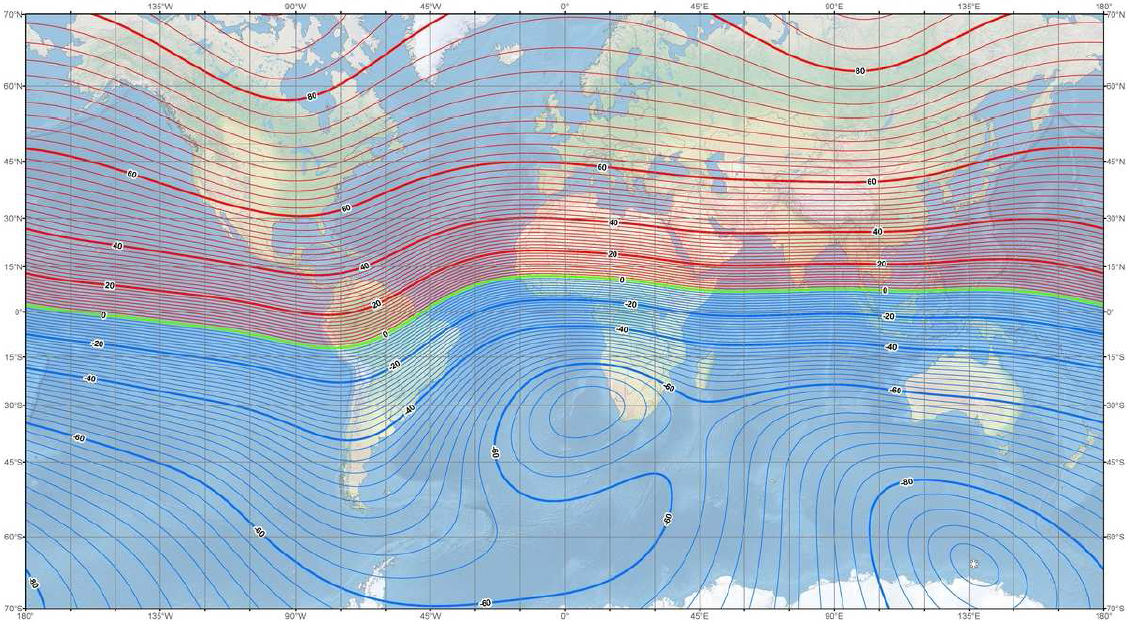
如果地磁与水平面的夹角(inclination angle)过大,那么它投影到水平面上的分量就很小。可以看到芬兰附近的 inclination angle 是很大的。还有就是其实地磁也不是完美的指向北方,某些地方是也是存在偏差角度的(declination angle)。另外外界对地磁测量也存在影响,例如硬铁(hard iron)和软铁(soft iron)(具体的网上查资料吧,我也不是特别清楚)。
所以不像 accel 可以直接使用,用来作为标准来校正。那么其实有一种方法可以规避掉地磁不准的情况:就是不使用地磁的数值来校正,而且是用它作为一个参照。因为我们的目的,并不是指北,而是为了校正 y 轴旋转。
方法就是:
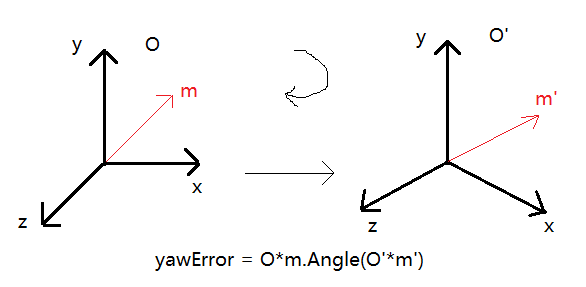
- 选取一个时刻(t1)的朝向(Orientation)O 和地磁(mag) ,计算出世界坐标下的地磁向量 m,作为参考(Ref)。
- 经过 dt 时间后,t2 时刻的朝向 O’ 和 地磁计算出此时世界坐标下的地磁向量 m’。
- 理论上如果没有 y 轴旋转偏差,那么 m’ 和 m 应该是重合的。所以 m’ 和 m 的夹角就是偏差角(yawError)。
- 经过一段时间后,检测作为 Ref 的 O 和当前 O’ 的夹角(偏差),如果大于某个阀值,那么用 O’ 和 m’ 作为新的 Ref。
细节处理
1. 前面原理里用某个时刻的 Orientation 和 mag 作为 Ref。Orientation 是 gyro 计算出来的。但是 gyro 的采样率比 mag 要高很多(我们平台上 gyro 是 800MHz,mag 是 100MHz)。所以 Orientation 和 mag 无法直接一一对应上的。因此使用了一个 buffer 缓冲区来保存一定数量的 Orientation,当前时候的 mag 要获取 Orientation 的时候,根据一个回退算法获取前一个时刻的 Orientation(因为 mag 的采样率比 gyro 低,所以要往前找):
|
|
2. 刚开始 yaw correct 的时候(头部跟踪模块初始化,或是休眠唤醒的时候),会等待一段时间(现在目前是 5s),等待 tile correct 将位置回正再开始 yaw correct。
3. 如果当前的 Orientation 对应的 gyro 转动速度太快(有一个阀值),那么就不做 yaw correct,因为转动过快,yaw correct 已经没意义了(tile correct 也是一样的,运动中不校正)。
4. 如果当前的地磁,投影到水平面的分量太小,则不校正:
|
|
剩下还有一些其它小细节,例如说 Ref 的一些分数取值,看下代码理解一下了。
朝向预测
朝向预测其实比较简单,原理就是通过上面的 fusion 算法,得到最后的朝向(Orientation)和转动角速度(AngularVelocity),然后给定预测的时间(pdt),在当前朝向的基础上加上 AngularVelocity * pdt 就是预测朝向了:
pose.Orientation = pose.Orientation * Quatf(angularVelocity, angularSpeed * dynamicDt)
预测算法的用途可以参看 ATW 的时序说明,简单来说就是应用渲染好的画面,送去显示,需要一段时间,如果按照实时朝向去渲染画面,那么最终在屏幕上看到的画面其实是之前一段时间的,就存在的延迟感。所以适当的预测,然后让应用使用未来的朝向来渲染,来补偿送显的延迟。
预测算法主要还是预测时间的选择上,例如说 ATW 选择的是 1.5 个 VSync。但是除了参数的自主选择,内部算法为了稳定性,还是做了一定的限制:
|
|
限制了预测的时间范围(不允许过大),根据当前速度和加速进行限制。不过我们现在加速度没有计算,所以限制只和速度有关。
Sensor hub gyro 偏移校准
一般来说如果把设备静止放置,理想情况下,gyro 上报的数据应该是 0,但是真实的情况是会存在误差的。一般来说在某些外界因素下,底层采集的原始数据有可能存在一定情况的偏移,例如说下面这种情况(静置情况下):
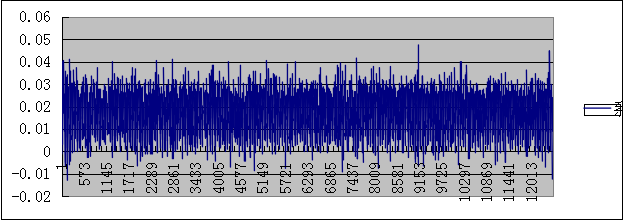
可以看到 gyro 底层采集到的数据很明显的偏移了一个数值(均值大概 0.02 rad/s 转化为角度大概是 1.14 deg/s),偏移很明显,这种情况下,头部跟踪融合出来的朝向数据,是会慢慢的超一个方向转动的。前面的 tile correct 和 yaw correct 均无法消除这种级别的偏差。
这种情况下,就需要底层采样上报的时候进行偏移校准。虽然这部分不属于上次头部跟踪,但是会影响到最后头部跟踪的最终效果,所以这里也调试分析了一下。google 提供的 contexthub(sensorhub)自带了一个动态的校准算法。
从上面的图可以看出来,其实校准的核心在于补偿静置时候的偏移误差。 就是计算出静置时候的 gyro 的数值(理论上来说这个时候 gyro 的值应该是0),然后在上报的时候减去这个补偿值就可以了。
校准流程
google contexthub gyro 动态校准流程是:
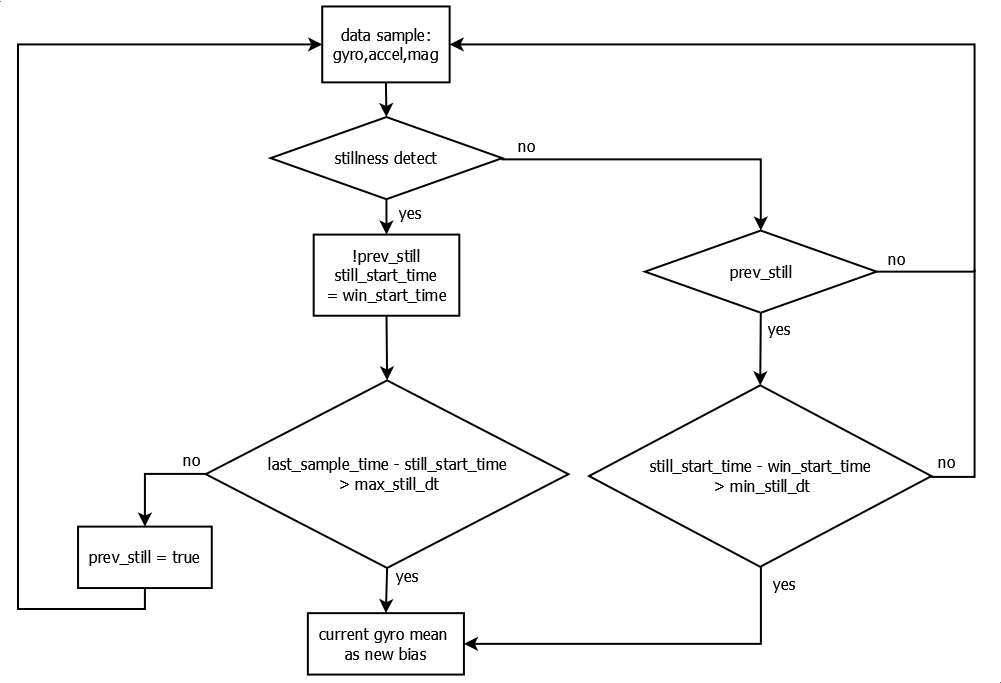
大概流程是:
- 采集 gyro, accel, mag
- 每次更新 gyro, accel, mag 到静置检测器(stillness detect),判断当前是否处于静置状态
- 如果处于静置状态并且维持一段时间,那么就将这段时间内 gyro 的平均值作为校准补偿值。
上述流程是一直在都在运行,也就是说在不停的检测是否处于静置状态,如果处于静置状态一段时间,那么就更新校准补偿值。从上面的流程图可以看到,处于静置状态持续的时间有2个阀值判断,一个是 min_stillness_duration,一个是 max_stillness_duration。这个2个值的区别是:
min_stillness_duration:
之前处于静置状态,当前不处于静置状态了,那么从开始处于静置状态的时间开始算,到当前不处于静置状态,如果这段时间大于 min_stillness_duration ,那么触发更新校准补偿值操作。
max_stillness_duration:
之前处于静置状态,现在也是静置状态(一直处于静置状态),那么从开始处于静置状态时间开始,到当前的时间,大于 max_stillness_duration,那么触发更新校准补偿值操作。
每次更新校准值后,都会重置静置状态检测器的状态,然后重新判断。当第一次进入静置状态(通过判断 prev_still 这个 flag)的时候会记录开始静置的时间戳。
min_stillness_duration、max_stillness_duration 这2个值都是可以配置,我调试的 VR 平台根据调试的数据,选择的是 3s 和 4s。
静置检测流程
接下来看一下,这个算法里面,关于静置检测的算法(上面流程中的 stillness detect)。静置检测的算法流程大致如下:
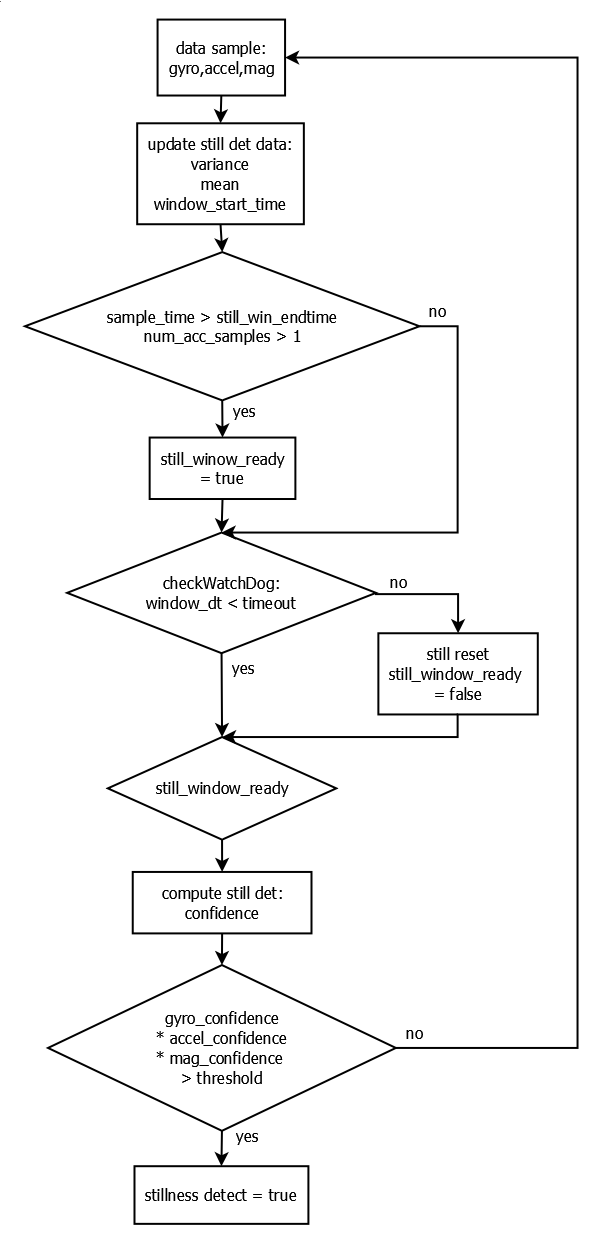
检测流程为:
- 采集 gyro、accel、mag
- 更新 gyro、accle、mag 数据,确定一个窗口时间和超时时间(一段采样时间)
- 在这个窗口时间(window_time_duration)内(不超时),对采样的数据计算方差(还可以计算平均值,用作后面的校准值)
- 通过方差计算得到一个可信度得分(confidence),如果得分高于设定的阀值,那么认为是静置的
首先是采样窗口的确定。window_time_duration 这个值也是可以配置的,VR9 上配置的是 1.5s。当检测器状态被重置,会拿第一个采样到的数据的时间戳当做窗口开始时间(window_start_time),然后 window_start_time + window_time_duration 就是 window_end_time。超时是 2* window_time_duration。超时是什么意思呢?这里的静置检测使用到了 gyro、accel、mag 3个 sensor 的数据来判断。开始的时间是第一个采集到 gyro 的时间,如果这段时间内 accel、mag 一直没采集到数据(num_acc_samples < 1),那么就认为是超时,重置状态,重新开始一个新采样窗口。
上面提到了最后是通过一个分数来判断的。这个分数是通过方差计算出来的。这里方差公式不贴了,网上很多,有比较简单(平均值也是),贴一下分数的计算公式:
1.设定一个方差的阀值,var_threshold,可以配置,VR9 配置为 0.00018 rad/s,还有一个方差的阀值变化范围值,threshold_delta,可以配置,VR9 配置为 0.00001 rad/s。根据这2个值可以得到2个范围上下限:
lower_var_thresh = var_threshold - threshold_delta
upper_var_thresh = var_threshold + threshold_delta
2. 如果当前窗口的3轴方差(win_var_x, win_var_y, win_var_z)其中有一个轴高于 upper_var_thresh 那么 confidence 为 0。方差越小,代表变化越小,也就越说明静置不动,confidence 的取值为 [0, 1],越接近1得分越高,就越代表可信(静置不动)。如果3轴方差全部小于 lower_var_thresh 则 confidence 为 1.
3.如果不是上面2种情况,那么按照下面的公式来计算 confidence:
|
|
上面的 gyroStillDetLimit 的作用就是限制输入参数的范围为 0 ~ 1.0f,即 < 0 的为0,> 1 的为 1.0f。
简单总结一下,上面的算法的核心就是通过一段时间的采样,然后计算方差(变化幅度),根据阀值来判断是否处于静置;处于静置,就使用这段时间的平均值作为新的补偿偏移(bias);上报的数据减去这个偏移值完成校准。
参数配置
这里一共有好几个参数可以配置:
|
|
我调试的 VR 平台主要是调节了这几个参数:
min_stillness_duration, max_stillness_duration,
window_time_duration
gyro_var_threshold, gyro_confidence_delta
stillness_threshold
默认的参数,我调试的 VR 平台 gyro 静置的时候变化相对来说比较大,原来默认的参数,在某些机器上经常无法判断静置的条件(静置情况下)。所以经常无法更新校准值,会导致缓慢的偏移。所以我根据实际调试情况,适当的调整了阀值范围,让这套算法适应我调试的 VR 平台。
google 的 contexthub 其实 accel,mag 也是有校准,不过由于并没有出什么问题,所以就没去研究。而且 google 的 contexthub 也带有 fusion 算法(其实就是 framework sensorservice 的 fusion 算法移过去了),以后也可以研究一下。
参考资料
(1). HeadTrackingforOculusRift.pdf
(2). Vrbookbig.pdf: Tracking 章节
(3). 有关 openGL 矩阵变化的原理
(4). oculus ovr headtracking source code: ovr/VRLib/jni/hmd/sensor (这个是 oculus 早期的一个开源版本的 ovr sdk,后面这部分好像就不开源了)
(5). aosp context hub gyro calibrate source code: android/device/google/contexthub/firmware/src/algos